
En el artículo publicado anteriormente “AMR: la nueva generación de vehículos autónomos” se explicaban las diferencias entre AGV y AMR, así como las prestaciones diferenciales del AMR.
Opciones de trabajo en los vehículos inteligentes AMR
En el presente artículo, queremos exponer las 2 opciones de trabajo posibles para los AMR, planteando si es mejor que estos vehículos inteligentes hagan uso de todas sus capacidades, y se les permita que eviten los obstáculos que se le presenten mientras ejecutan sus diferentes rutas, o, por el contrario, es preferible un mayor control sobre sus desplazamientos y que funcionen con rutas virtuales establecidas.
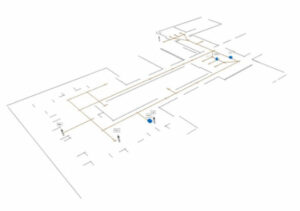
Figura 1. Rutas virtuales de AMR
La respuesta depende de las necesidades de la aplicación en cuestión.
Por ejemplo, en algunas ocasiones, si el vehículo es pequeño, y su espacio de funcionamiento es concurrido por muchas personas, evitar el obstáculo puede ser un enfoque eficiente. Este es el caso de robots autónomos de limpieza o desinfección tan usados durante esta pandemia Covid.
Por otro lado, es importante resaltar qué para la mayor parte de aplicaciones industriales, usar una ruta fija virtual para gestionar las misiones de los AMR se trata de la mejor opción, ya que las plantas de producción requieren de desplazamientos recurrentes precisos para conseguir procesos eficientes.
A continuación, se exponen las principales causas que explican esta elección:
- Moverse alrededor de un obstáculo reduce la eficiencia en general, y puede llevar a alejarse de la ruta óptima.

- En entornos complejos y con espacio limitado (como en plantas industriales de producción), a menudo no hay espacio para moverse alrededor de los obstáculos.
- En vehículo de grandes dimensiones, el personal puede no estar seguro de cómo el vehículo evitará el obstáculo, provocando situaciones de stress y aumentando la percepción de riesgo entre los operarios (incluso cuándo el riesgo es mínimo debido a los sistemas de seguridad por láser).
- La gestión del tráfico es mucho más eficaz con la opción de seguimiento de rutas virtuales. Si los AMR eligen sus propias rutas para evitar obstáculos, los problemas de tráfico de flotas de vehículos son prácticamente imposibles de evitar.
- Si los AMR son libres de sortear obstáculos, puede que el personal de planta tenga menos cuidado en respetar los espacios libres de las rutas para la circulación de los vehículos, tendiendo a empeorar los lay-out para una gestión eficiente de mercancías.
Como conclusión, en la mayoría de los casos para aplicaciones en plantas de producción, controlar la ruta de los AMR a través de rutas virtuales (parando y esperando cuando encuentren un obstáculo), es el enfoque más eficiente, y que provoca mayor sensación de control y seguridad en la organización de la producción.
VIDEO:
Plataforma AND&OR Robot Móvil Autónomo (AMR) con 2 posiciones y carretilla elevadora trabajando colaborativamente




{kind=link}
{kind=link}
{kind=link}
{kind=link}
Deja tu comentario